2 Wheel Self Balancing Robot By Using Arduino And Mpu6050 Info
2 Wheel Self Balancing Robot By Using Arduino And Mpu6050. Initially, brushed motors work fine but over time, with use, these tend to develop instability and inability to balance the robot. I'm doing my final year's thesis about self balance robot, using arduino uno and imu mpu6050. 3) motor driver :1 of module l298n cost : This is a robot model; The circuit diagram for the same is shown below. Project tutorial by roland pelayo. Three values from the accelerometer and three from the gyroscope. I've tried pid controller and kalman filter to filter the raw readings from the sensor, but still could not get my robot to balance at all. Arduino uno r3 microcontroller board is used for this project. This is self balancing robot on two wheels using mpu6050 accelerometer. Use arduino as the controller and sensor mpu6050 to control the balance. We have used two 12v, 300rpm, geared and brushed dc motors and two 100mm wheels. After connecting the power source, the dc motor wheels spin at a constant speed and only in one direction, regardless of how the mpu6050 is tilted. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make the remote control.

1 of mpu6050 gy521 cost : The two wheeled self balancing robot represents a robotic platform with two independently actuated wheels and center of gravity above the axis of the wheels rotation.the behavior of the robot is similar to the classical mechanical system of an. The mpu6050 reads the current tilt of the robot and feeds it to the pid algorithm, which performs calculations to control the motor and keep the robot in the upright position. Embed the widget on your own site. The two wheeled self balancing robot represents a robotic platform with two independently actuated wheels and center of gravity above the axis of the wheels rotation.the behavior of the robot is similar to the classical mechanical system of an inverted pendulum. Three values from the accelerometer and three from the gyroscope. This is self balancing robot on two wheels using mpu6050 accelerometer. Arduino uno r3 microcontroller board is used for this project. 4) batteries + batteries holder (prefer to have at least 1 with 3.5mm jack to power arduino uno) : Initially, brushed motors work fine but over time, with use, these tend to develop instability and inability to balance the robot. It can balance itself on 2 wheels using a mpu6050 sensor and arduino. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. I bought my first arduino three years ago. The best option is to use brushless dc motors, which have great. Install 2 motor brackets on the frame.
I'm doing my final year's thesis about self balance robot, using arduino uno and imu mpu6050.
Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make the remote control. Add the following snippet to your html:
Use arduino as the controller and sensor mpu6050 to control the balance. The controller is arduino uno and the sensor is mpu6050. I've done some research on google, but as from what i read, most people use the dmp in the arduino sample. Thempu 6050 is a sensor based on mems (micro electro mechanical systems) technology. The motors are 12v 500rpm and the wheels are 8cm in diameter. 3) motor driver :1 of module l298n cost : Easy to build and control. I'm doing my final year's thesis about self balance robot, using arduino uno and imu mpu6050. The best option is to use brushless dc motors, which have great. Install 3 acrylic board together by using brass stud m4x16, screw m3 and nut m3 to build the frame. My latest arduino diy project is a self balancing robot. The information provided by the mpu6050 about the change in the angular position of the robot is valuable for the arduino to decide what the necessary action is to restore balance. Use arduino as the controller and sensor mpu6050 to control the balance. We have used two 12v, 300rpm, geared and brushed dc motors and two 100mm wheels. Robot size is 17x10x30 cm. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make the remote control. In this section, a comprehensive understanding of mpu6050’s working is made and we discuss how to use the arduino ide to code out and retrieve the data from the. Project tutorial by roland pelayo. This is a robot model; Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. Install 2 motor brackets on the frame.
We have used two 12v, 300rpm, geared and brushed dc motors and two 100mm wheels.
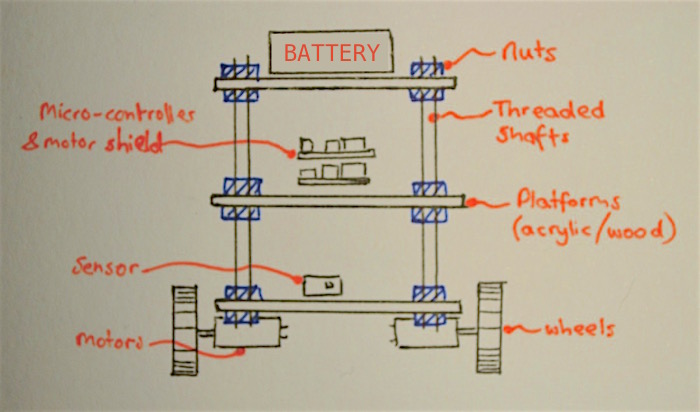
This is a robot model; Install 3 acrylic board together by using brass stud m4x16, screw m3 and nut m3 to build the frame. The arduino and the l298n motor driver module is directly powered through the vin.
After connecting the power source, the dc motor wheels spin at a constant speed and only in one direction, regardless of how the mpu6050 is tilted. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. Project tutorial by roland pelayo. Arduino uno r3 microcontroller board is used for this project. 3) motor driver :1 of module l298n cost : The circuit diagram for the same is shown below. The motors are 12v 500rpm and the wheels are 8cm in diameter. 1 of mpu6050 gy521 cost : This is a self balancing robot using arduino and mpu6050 so we ave to interface the mpu6050 with arduino and connect the motors though the motor driver module. Thempu 6050 is a sensor based on mems (micro electro mechanical systems) technology. Mpu6050, an 6dof imu (with accelerometer and gyroscope) is used to get the angle and l298n motor controller board controls the 2 motors. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make the remote control. My latest arduino diy project is a self balancing robot. The motors are 12v 500rpm and the wheels are 8cm in diameter. I bought my first arduino three years ago. We have used two 12v, 300rpm, geared and brushed dc motors and two 100mm wheels. Install 2 motor brackets on the frame. Control of the robot via joy stick using bluetooth It can balance itself on 2 wheels using a mpu6050 sensor and arduino. The controller is arduino uno and the sensor is mpu6050. In this section, a comprehensive understanding of mpu6050’s working is made and we discuss how to use the arduino ide to code out and retrieve the data from the.
The mpu6050 reads the current tilt of the robot and feeds it to the pid algorithm, which performs calculations to control the motor and keep the robot in the upright position.
The circuit diagram for the same is shown below. My latest arduino diy project is a self balancing robot. Robot size is 17x10x30 cm.
Mpu6050, an 6dof imu (with accelerometer and gyroscope) is used to get the angle and l298n motor controller board controls the 2 motors. This is a self balancing robot using arduino and mpu6050 so we ave to interface the mpu6050 with arduino and connect the motors though the motor driver module. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. The circuit diagram for the same is shown below. Mpu6050, an 6dof imu (with accelerometer and gyroscope) is used to get the angle and l298n motor controller board controls the 2 motors. Robot size is 17x10x30 cm. Add the following snippet to your html: Arduino uno r3 microcontroller board is used for this project. Use arduino as the controller and sensor mpu6050 to control the balance. Can use aa, 9v or 18650 or phone power bank. I bought my first arduino three years ago. The arduino and the l298n motor driver module is directly powered through the vin. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make the remote control. Use arduino as the controller and sensor mpu6050 to control the balance. Initially, brushed motors work fine but over time, with use, these tend to develop instability and inability to balance the robot. 1 of mpu6050 gy521 cost : We have used two 12v, 300rpm, geared and brushed dc motors and two 100mm wheels. This is a robot model; My latest arduino diy project is a self balancing robot. 3) motor driver :1 of module l298n cost : Project tutorial by roland pelayo.
Initially, brushed motors work fine but over time, with use, these tend to develop instability and inability to balance the robot.
Arduino uno r3 microcontroller board is used for this project. The motors are 12v 500rpm and the wheels are 8cm in diameter. Embed the widget on your own site.
It can balance itself on 2 wheels using a mpu6050 sensor and arduino. The best option is to use brushless dc motors, which have great. In the first version, the controller is arduino uno, then in the sencond version as. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. Install 2 motor brackets on the frame. The mpu6050 reads the current tilt of the robot and feeds it to the pid algorithm, which performs calculations to control the motor and keep the robot in the upright position. I've tried pid controller and kalman filter to filter the raw readings from the sensor, but still could not get my robot to balance at all. Project tutorial by roland pelayo. 4) batteries + batteries holder (prefer to have at least 1 with 3.5mm jack to power arduino uno) : The two wheeled self balancing robot represents a robotic platform with two independently actuated wheels and center of gravity above the axis of the wheels rotation.the behavior of the robot is similar to the classical mechanical system of an. Easy to build and control. Robot size is 17x10x30 cm. My latest arduino diy project is a self balancing robot. Control of the robot via joy stick using bluetooth We have used two 12v, 300rpm, geared and brushed dc motors and two 100mm wheels. Use arduino as the controller and sensor mpu6050 to control the balance. The motors are 12v 500rpm and the wheels are 8cm in diameter. Mpu6050, an 6dof imu (with accelerometer and gyroscope) is used to get the angle and l298n motor controller board controls the 2 motors. Three values from the accelerometer and three from the gyroscope. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make the remote control. The circuit diagram for the same is shown below.
This is a self balancing robot using arduino and mpu6050 so we ave to interface the mpu6050 with arduino and connect the motors though the motor driver module.
I've tried pid controller and kalman filter to filter the raw readings from the sensor, but still could not get my robot to balance at all. In this section, a comprehensive understanding of mpu6050’s working is made and we discuss how to use the arduino ide to code out and retrieve the data from the. It can balance itself on 2 wheels using a mpu6050 sensor and arduino.
The arduino and the l298n motor driver module is directly powered through the vin. Use arduino as the controller and sensor mpu6050 to control the balance. This is a robot model; 4) batteries + batteries holder (prefer to have at least 1 with 3.5mm jack to power arduino uno) : My latest arduino diy project is a self balancing robot. Thempu 6050 is a sensor based on mems (micro electro mechanical systems) technology. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. I'm doing my final year's thesis about self balance robot, using arduino uno and imu mpu6050. My serial monitor has also been reading gibberish letters and symbols when i have the circuit connected. I've tried pid controller and kalman filter to filter the raw readings from the sensor, but still could not get my robot to balance at all. In the first version, the controller is arduino uno, then in the sencond version as. Can use aa, 9v or 18650 or phone power bank. The motors are 12v 500rpm and the wheels are 8cm in diameter. Mpu6050, an 6dof imu (with accelerometer and gyroscope) is used to get the angle and l298n motor controller board controls the 2 motors. Arduino uno r3 microcontroller board is used for this project. The two wheeled self balancing robot represents a robotic platform with two independently actuated wheels and center of gravity above the axis of the wheels rotation.the behavior of the robot is similar to the classical mechanical system of an. The information provided by the mpu6050 about the change in the angular position of the robot is valuable for the arduino to decide what the necessary action is to restore balance. I've done some research on google, but as from what i read, most people use the dmp in the arduino sample. Easy to build and control. 3) motor driver :1 of module l298n cost : The mpu6050 reads the current tilt of the robot and feeds it to the pid algorithm, which performs calculations to control the motor and keep the robot in the upright position.
Mpu6050, an 6dof imu (with accelerometer and gyroscope) is used to get the angle and l298n motor controller board controls the 2 motors.
The two wheeled self balancing robot represents a robotic platform with two independently actuated wheels and center of gravity above the axis of the wheels rotation.the behavior of the robot is similar to the classical mechanical system of an. Easy to build and control. This is self balancing robot on two wheels using mpu6050 accelerometer.
In this section, a comprehensive understanding of mpu6050’s working is made and we discuss how to use the arduino ide to code out and retrieve the data from the. Thempu 6050 is a sensor based on mems (micro electro mechanical systems) technology. This is a robot model; Hello everyone, i have finished building the circuit for my self balancing robot, yet it is not working as intended. This is a self balancing robot using arduino and mpu6050 so we ave to interface the mpu6050 with arduino and connect the motors though the motor driver module. Mpu6050, an 6dof imu (with accelerometer and gyroscope) is used to get the angle and l298n motor controller board controls the 2 motors. Three values from the accelerometer and three from the gyroscope. Install 3 acrylic board together by using brass stud m4x16, screw m3 and nut m3 to build the frame. The circuit diagram for the same is shown below. Robot size is 17x10x30 cm. The controller is arduino uno and the sensor is mpu6050. Initially, brushed motors work fine but over time, with use, these tend to develop instability and inability to balance the robot. The best option is to use brushless dc motors, which have great. The mpu6050 reads the current tilt of the robot and feeds it to the pid algorithm, which performs calculations to control the motor and keep the robot in the upright position. Can use aa, 9v or 18650 or phone power bank. The motors are 12v 500rpm and the wheels are 8cm in diameter. After connecting the power source, the dc motor wheels spin at a constant speed and only in one direction, regardless of how the mpu6050 is tilted. Embed the widget on your own site. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make the remote control. Control of the robot via joy stick using bluetooth The two wheeled self balancing robot represents a robotic platform with two independently actuated wheels and center of gravity above the axis of the wheels rotation.the behavior of the robot is similar to the classical mechanical system of an.
The best option is to use brushless dc motors, which have great.
I bought my first arduino three years ago.
In this section, a comprehensive understanding of mpu6050’s working is made and we discuss how to use the arduino ide to code out and retrieve the data from the. Initially, brushed motors work fine but over time, with use, these tend to develop instability and inability to balance the robot. The two wheeled self balancing robot represents a robotic platform with two independently actuated wheels and center of gravity above the axis of the wheels rotation.the behavior of the robot is similar to the classical mechanical system of an. This is self balancing robot on two wheels using mpu6050 accelerometer. Just add a simple serial bluetooth module and use a bluetooth serial controller app for android phone to make. 4) batteries + batteries holder (prefer to have at least 1 with 3.5mm jack to power arduino uno) : Control of the robot via joy stick using bluetooth The information provided by the mpu6050 about the change in the angular position of the robot is valuable for the arduino to decide what the necessary action is to restore balance. The motors are 12v 500rpm and the wheels are 8cm in diameter. I've tried pid controller and kalman filter to filter the raw readings from the sensor, but still could not get my robot to balance at all. 1 of mpu6050 gy521 cost : Easy to build and control. Add the following snippet to your html: The two wheeled self balancing robot represents a robotic platform with two independently actuated wheels and center of gravity above the axis of the wheels rotation.the behavior of the robot is similar to the classical mechanical system of an inverted pendulum. The best option is to use brushless dc motors, which have great. Embed the widget on your own site. Can use aa, 9v or 18650 or phone power bank. Use arduino as the controller and sensor mpu6050 to control the balance. The motors are 12v 500rpm and the wheels are 8cm in diameter. This is a self balancing robot using arduino and mpu6050 so we ave to interface the mpu6050 with arduino and connect the motors though the motor driver module. It can balance itself on 2 wheels using a mpu6050 sensor and arduino.